






动态音调模拟器
动态音调模拟器
添加在现有雪橇上模拟俯仰的功能
Seattle Safety 动态俯仰模拟器是滑车测试系统的经济型附加配件。当前的实验室管理人员无需更换系统即可添加俯仰模拟,新客户可以放心购买,因为他们知道他们可以在未来随时添加模拟器。
在用于全正面碰撞测试的台车试验系统中添加俯仰模拟,可以提高台车试验和障碍物试验之间乘员伤害表现的相关性,为工程师提供更好的设计数据,从而设计出更好的工程设计和更安全的车辆。
- 随时添加经过验证的投球模拟,突破简单,投资最少
- 仅需对测试实验室进行微小的修改——俯仰模拟器直接安装到现有的滑车和反作用块上
- 不会影响非俯仰测试——俯仰固定装置可在一小时或更短的时间内轻松拆除,以最大限度地提高有效载荷、摄像机视野和通道
- 采用固定路径引导的可重复轨迹无需昂贵的控制系统

只需进行少量修改
动态俯仰模拟器可以安装在现有的滑车测试系统上,只需对测试实验室进行少量的改造。
经过验证的可重复轨迹
由于固定路径引导,俯仰运动高度精确且可重复,无需昂贵的控制系统。
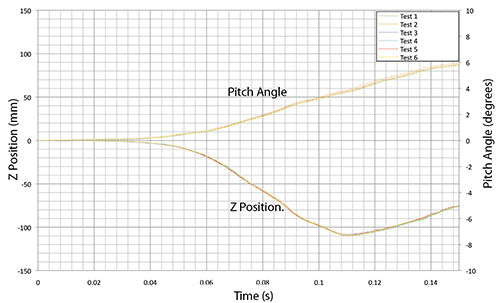
大多数投球曲线都可以使用投球模拟器系统提供的七个标准导轨进行精确模拟。系统会选择正确的导轨进行测试,并在测试前以电子方式定位它们。
对于固定路径导向,水平脉冲是唯一的调整变量;使用现有的滑橇脉冲调整算法可以快速实现滑橇脉冲和俯仰性能。
| 2.0MN 伺服滑轨 | 3.1MN 伺服滑橇 | |
|---|---|---|
| 最大有效载荷 | 1600 公斤 | 2000 公斤 |
| 最大有效载荷尺寸 | 2.7 米(长)x 2.1 米(宽) | 2.9 米(长)x 2.2 米(宽) |
| 最大水平加速度* | 50克 | 64克 |
| 最大水平速度* | 73 公里/小时 | 80 公里/小时 |
| 最大水平行程 | 2.0 米 | 2.0 米 |
| 最大水平抖动率 | 20克/毫秒 | 20克/毫秒 |
| 俯仰角 | -3⁰ 至 17⁰ | -3⁰ 至 17⁰ |
| 最大角速率* | > 250⁰ / 秒 | > 250⁰ / 秒 |
| 最大角加速度* | 21000⁰ / 秒^2 | 26000⁰ / 秒^2 |
| 最大垂直速度* ^ | >5米/秒 | >5米/秒 |
| 最大垂直加速度* ^ | 40 克 | 50克 |
注意:此处包含的任何性能数据均取决于操作条件。
* 有效载荷为 1,000 公斤。
这些值是导向几何的函数,仅受系统结构强度的限制。
^在重心处测量。