






Simulator Padang Dinamik
Tambahkan keupayaan untuk mensimulasikan padang pada kereta luncur anda yang sedia ada
Simulator Padang Dinamik Keselamatan Seattle ialah aksesori tambahan yang menjimatkan kepada sistem ujian kereta luncur. Pengurus makmal semasa boleh menambah simulasi padang tanpa menggantikan sistem mereka dan pelanggan baharu boleh membeli dengan yakin mengetahui mereka boleh menambah simulator pada bila-bila masa pada masa hadapan.
Menambah simulasi padang pada sistem ujian kereta luncur untuk ujian impak hadapan penuh boleh meningkatkan korelasi prestasi kecederaan penghuni antara ujian kereta luncur dan ujian penghalang, memberikan jurutera data reka bentuk yang lebih baik yang menghasilkan kejuruteraan yang lebih baik dan kenderaan yang lebih selamat.
- Tambahkan simulasi pitching yang terbukti pada bila-bila masa dengan kesederhanaan penemuan dan pelaburan yang minimum
- Hanya pengubahsuaian makmal ujian kecil yang diperlukan – simulator padang dipasang terus ke kereta luncur dan blok tindak balas sedia ada
- Tidak menjejaskan ujian bukan nada – lekapan padang boleh dialih keluar dengan mudah dalam masa sejam atau kurang untuk memaksimumkan muatan, paparan kamera dan akses
- Trajektori berulang yang terbukti menggunakan panduan laluan tetap menghapuskan keperluan untuk sistem kawalan yang mahal

Hanya pengubahsuaian kecil diperlukan
Simulator Padang Dinamik boleh dipasang pada sistem ujian kereta luncur sedia ada dengan hanya pengubahsuaian kecil makmal ujian.
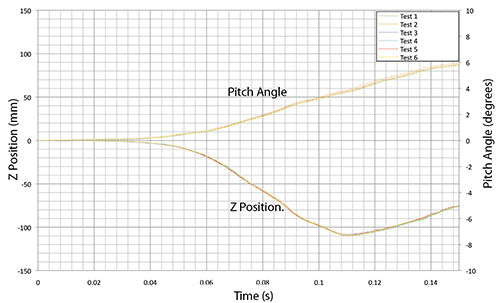
Trajektori berulang yang terbukti
Pergerakan pic adalah sangat tepat dan boleh diulang kerana panduan laluan tetap, menghapuskan keperluan untuk sistem kawalan yang mahal.
Kebanyakan profil pitching boleh disimulasikan dengan tepat menggunakan tujuh panduan standard yang disediakan dengan sistem simulator pitch. Sistem memilih panduan yang betul untuk ujian dan meletakkannya secara elektronik sebelum ujian.
Dengan panduan laluan tetap, nadi mendatar adalah satu-satunya pembolehubah penalaan; prestasi nadi sled dan pic dicapai dengan cepat menggunakan algoritma penalaan nadi sled sedia ada.
| 2.0MN ServoSled | 3.1MN ServoSled | |
|---|---|---|
| Maks. Muatan | 1600 Kg | 2000 Kg |
| Maks. Saiz Muatan | 2.7m (L) x 2.1m (W) | 2.9m (L) x 2.2m (W) |
| Maks. Pecutan Mendatar* | 50g | 64g |
| Maks. Halaju Mendatar* | 73 kph | 80 kph |
| Maks. Strok Mendatar | 2.0 m | 2.0 m |
| Maks. Kadar Jerk Mendatar | 20 g/msec | 20 g/msec |
| Sudut Padang | -3⁰ hingga 17⁰ | -3⁰ hingga 17⁰ |
| Maks. Kadar Sudut* | > 250⁰ / saat | > 250⁰ / saat |
| Maks. Pecutan Sudut* | 21000⁰ / saat^2 | 26000⁰ / saat^2 |
| Maks. Halaju Menegak* ^ | > 5m / saat | > 5m / saat |
| Maks. Pecutan Menegak* ^ | 40 g | 50 g |
Nota: sebarang data prestasi yang terkandung di sini adalah bergantung kepada keadaan operasi.
* Pada muatan 1,000 kg.
Nilai adalah fungsi geometri panduan dan dihadkan hanya oleh kekuatan struktur sistem.
^Diukur pada pusat graviti.